激光雷达飞行计划
一个用户干预最小的系统
机载激光雷达已经成为获取精确、一致和密集点云的常规技术。然而,规格、可用传感器和空中平台的限制仍然是激光雷达数据采集的一个挑战。最佳飞行计划是必不可少的。目前的实践依赖于经验法则和试错,这意味着最优的解决方案很少。作者开发了一种激光雷达飞行计划系统,该系统在高度自动化的情况下提供了一个最佳的解决方案,并且只需要最小的用户干预。
激光雷达数据采集后,应满足密度、重叠、空间分布和精度等要求。数据集群和空洞应该不存在。更多的要求可以在美国地质调查局国家地理空间计划激光雷达指南和基础规范第13版.规格、可用传感器和空中平台的限制使激光雷达数据采集成为一项具有挑战性的任务。同时捕捉摄影测量图像的需要使问题进一步复杂化。
飞行计划
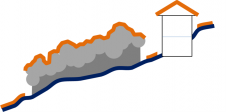
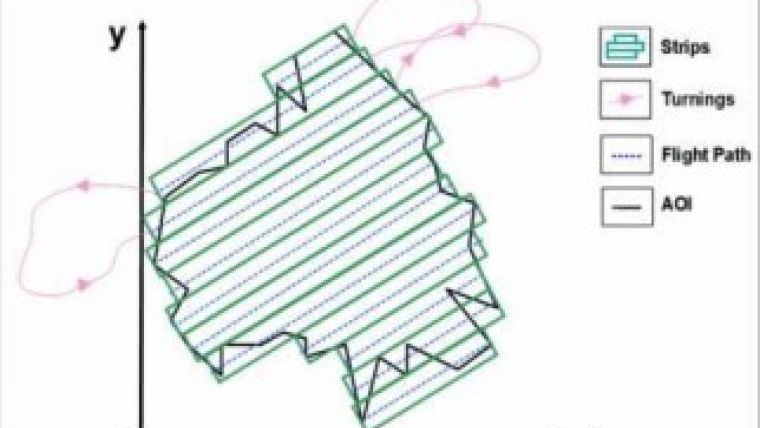
激光雷达飞行规划从将一个区域划分为矩形条开始(图1),确定一条航线后,飞行器需要转向下一条航线。飞行计划通过模拟演习定义航线和其他飞行参数,从而以最低成本获取预定规格的激光雷达和/或图像数据。飞行计划探讨了激光雷达扫描仪、相机、飞机、导航传感器(GNSS和IMU)、地形特征和其他组件之间的关系。最终的飞行计划由飞行人员和传感器操作员使用。
因此,飞行规划应考虑传感器可能的工作范围,包括脉冲重复频率(PRF)、视场(FOV)、扫描频率、波束发散度、地面采样距离(GSD)、飞行高度、弹道位置和姿态。此外,它还应考虑到由于观测误差导致的点云中点的三维坐标或正射影片中可测量的二维坐标的精度。飞行计划还应考虑对飞行方向、转弯类型、最大倾斜角度和缓冲时间(从一个飞行带的末端到下一个飞行带的开始所需时间以外的时间)的偏好。
当前实践
所有这些都应该包含在一个单一的、全面的软件系统中,以产生最佳的飞行计划。但是,目前的做法包括手动和半自动方法;两者都使用了经验法则,比如飞行方向应该沿着最长的方向。参数之间的关系是通过改变一个参数并注意其对其他参数和飞行计划本身的影响来实现的。这些方法是迭代的,基于试验和错误,将所有参数视为独立的实体,并通过启发式规则或用户干预做出决策。这些半自动方法是作为基于图形用户界面(gui)的软件实现的。Murphy(2004)的一项专利应用就是此类软件的一个例子。最近,landwing和Whitcare(2008)以及Tian等人(2011)发表了初步研究,在这些研究中,他们强调了当前方法的局限性和改进的必要性。
新系统
因此,作者进行了一项全面的研究,旨在开发一个软件包,该软件包涵盖了机载激光雷达数据采集的所有组件,如传感器、平台、用户需求、用户偏好和地形特征,以及在同一飞行期间的摄影测量图像采集。最终的系统主要利用了不同组件之间的数学关系。例如,数据密度、重叠和地形起伏之间的关系可以用数学公式表示。沿道和跨道间距与标称脉冲间距之间的关系也是如此。在同时采集图像的情况下,必须利用机载数码相机视场与激光雷达扫描仪视场之间的关系。数学的发展脱离了对基本原理的考察。接下来,公式被转换成算法,最后转换成计算机代码。该系统还评估了各种转向机构,因为转向类型影响优化设计。区分了连续转弯、非连续转弯和混合转弯。连续转弯意味着下一条带与前一条带相邻; this is in contrast to non-consecutive turning. A combination of the two is called hybrid turning. Unlike previous approaches, the determination of the optimal turning mechanism is an integrated part of the system. The accuracy of the six exterior orientation parameters obtained from the GNSS/IMU device, the accuracy of the Lidar scanner and the accuracy of the spatial arrangement of both devices propagate as errors in the final products. The required accuracies of the end products are also taken into account to determine the optimal flight path.
目标函数
数学关系表明,飞行时间、数据要求和数据质量是扫描仪参数(PRF、FOV、扫描频率)和飞行参数(飞行高度、飞行速度、飞行方向)的函数。制定了一个目标函数,将飞行时间与这些参数联系起来,同时考虑到数据规格和质量等方面的限制。该目标函数的参数性质、目标函数本身和约束条件表明,遗传算法为目标函数的优化提供了很好的解决方案。遗传算法提供了解决问题的一系列配置,并发现了一种算法,解决机载激光雷达的复杂情况最好。
例子
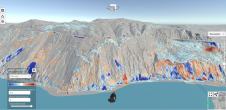
图2中的黑线显示了一个4km的边界2兴趣区域(AOI)。AOI必须由激光雷达和数字图像同时捕获。数据要求、传感器和飞行器参数如表1所示。沿轨间距和跨轨间距与沿轨间距之差的比值最大可达10%。
数据密度:最小/最大 |
10 / 13点/米2 |
最小重叠/尾圈/侧圈 |
10% / 60% / 25% |
高程/平面误差 |
10厘米/ 15厘米 |
最大德牧 |
15厘米 |
整个AOI的起伏变化 |
200米 |
最大倾斜角/缓冲期 |
25º/ 30秒 |
激光雷达扫描 |
Optech ALTM 3100 ea |
相机 |
Applanix DSS 322 (60mm焦距) |
导航传感器 |
Applanix POS AV510 |
飞机 |
赛斯纳 |
表1数据要求和设备规格。
将上述要求和规范输入到飞行规划软件中,得到如图2所示的条带,扫描仪和飞行参数如表2所示。
扫描参数 |
飞行参数 |
||||
视场 |
扫描频率 |
脉冲重复频率 |
高度 |
速度 |
方向 |
7º |
70赫兹 |
100千赫 |
886.3米 |
45.9米/秒 (90节) |
9.9º |
表2扫描仪和飞行参数的最优值。
结束语
该方法在满足任何地形的数据需求和保证质量的同时,要求最小的用户干预,以最短的飞行时间自动计算出最优飞行计划。飞行计划系统是通用的,可扩展的飞行时间的新定义,现场限制,未来的需要和任何额外的要求的激光雷达数据。与当前的实践相比,它提供了更高水平的自动化。作者已经在坎普尔印度理工学院申请了一项专利。
作者传记
Ajay Dashora拥有遥感教育背景,并获得印度坎普尔理工学院(IITK)的博士学位,研究机载激光雷达。他是该专利申请的主要创新者。他的研究兴趣是物理建模和遥感技术的集成。
巴拉特•他是印度坎普尔理工学院土木工程系的副教授。在那里,他领导了激光雷达研究小组,并一直是获奖的激光雷达模拟器的关键人物。Lohani博士目前是ISPRS工作组V-2的联合主席,也是印度测量师协会的研究员。
电子邮件:blohani@iitk.ac.in
Kalyanmoy Deb他是印度坎普尔理工学院(IITK)机械工程系教授,坎普尔遗传算法实验室(KANGAL)创始人。他是KANGAL优化领域的所有研究活动的领导者,并在优化研究领域获得了许多荣誉和著名的国家和国际奖项。
电子邮件:deb@iitk.ac.in