Multibeam Lidar for Mobile Mapping Systems
特征and Productivity
Various multibeam Lidar sensors are suited for mobile mapping. Read this article to learn more about their features and productivity.
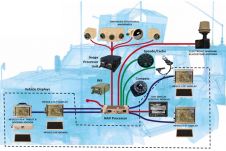
In mobile mapping, geospatial data is acquired by one or more cameras and/or one or more Lidar sensors mounted on a vehicle that moves over land, through water or through the air. The distribution of Lidar beams over the scene may be realized by a spinning mirror or by a solid-state device. Multiple beams may be emitted simultaneously, and single or multiple returns may be captured.
In the case of the selected Lidar sensors, the mechanisms for distributing emitted beams over the scene are based on either a spinning mirror or on solid-state technology. The mirrors may spin in an oscillating or rotating way. These spinning devices have moving mechanical parts which may introduce disturbances and malfunctioning, and thus affect the quality of the measured point cloud. Furthermore, calibration is continuously required, leading to higher surveying costs. Solid-state Lidar sensors have no mechanical parts, but the downside is a limited field of view (FoV) meaning that three, four or even more sensors are necessary to obtain full 360o覆盖范围。在考虑LiDAR传感器的特征时,仪器的操作方面及其测量特性对于移动映射很重要。影响运营方面的主要因素是尺寸,重量,功耗和价格。测量特性包括最大范围,范围精度,VFOV和点密度 - 所有这些都应高。点密度主要取决于光束差异,束输出速率和角度分辨率。这些测量特征将在下面更详细地讨论。
测量特征
Maximum range:制造商在80%或10%的目标反射率下指定最大范围。对于汽车和其他闪亮的物体,反射率约为80%,导致最大范围更长。对于人行道和其他哑光物体,反射率约为10%,导致最大范围较短。鉴于大多数现实生活目标的反射率率较低,因此更长的LiDAR扫描范围是首选。较长的最大范围意味着更好的覆盖范围,这对移动映射应用程序有益。
范围准确性通常不同2厘米至20厘米the measured range. The higher the range accuracy, the higher the quality of the point cloud representation of road surfaces, road furniture, buildings, trees and other objects of interest will be. After emission, the laser beam diverges and propagates as a cone, resulting in an elliptical footprint when the beam hits a surface. Capturing small objects at longer distances from the vehicle requires small footprints.
Point densityis largely determined by the beam output rate, which is usually specified as points per second (pts/sec) emitted by the Lidar system. If the applications require high point densities, then the beam output rate is crucial. The smaller the angular resolution, which is usually specified for both vertical and horizontal directions, the denser the point cloud and thus the more detail is present. Usually, Lidar sensors capture the first and the strongest returns. These multi-return sensors result in denser point clouds and better object representations.

VFoV:Most spinning Lidar sensors have horizontal field of view (HFoV) coverage of 360°. Solid-state systems require three or more aligned sensors to obtain full 360° coverage. On the other hand, the larger the VFoV, the better the scene is covered.
The features of Lidar sensors discussed above largely determine the survey productivity of a mobile mapping system (MMS). A selection of Lidar systems that are potentially suited for mobile mapping (see Figure 1) have been categorized – based on the specifications given by the manufacturers – into four groups: very-high productivity, high productivity, adequate productivity and others. The specifications of the selected systems are listed in Table 1.

(点击这里for a high-resolution version of the table)
高生产率(128梁)
三个选定的LIDAR传感器已放置在高生产率的顶部。影响生产率的主要因素是同时发出的激光束数。当前,最大梁数为128。
With a total output rate of 2.6 million pts/sec for all 128 beams together, theOuster OS1-128has the highest output rate of all selected systems. Its price and VFoV of 45˚ give it the edge over the other types. The other very-high productivity Ouster LidarsOS0-128andOS2-128are less suitable for the mobile mapping applications because of either shorter scanning ranges or narrower VFoV.
With a total output rate of 2.4 million pts/sec for all the 128 beams together, theVelodyne Alpha Primescores as one of the best spinning devices. Compared to other 128-beam sensors, this system has a wide VFoV, a high number of returns and a long maximum range. With respect to size and weight, the Alpha Prime is one of the largest and heaviest systems.
The solid-stateLuminar最大范围最长,输出率超过半百万分/秒。由于需要三个设备才能达到360°VFOV,因此总输出率为150万PTS/秒。该系统的重量为3.9公斤,相对较重。
High Productivity (64 beams)
该细分市场已将四个LiDAR传感器分类。它们的生产率较低,因为同时发射的激光束数为64,是顶部段中的一半。旋转Ouster OS1-64其输出率为130万分/秒,最大范围为120m。光束在水平面周围对称分布,VFOV很好。结果,该系统具有许多有益的特性 - 尤其是在车辆上安装两个LiDAR传感器时。
TheOuster OS2-64also has an output rate of 1.3 million pts/sec and its maximum range is 240m. The narrow VFoV and its larger size make it less suited for mobile mapping however. Both of these Ouster sensors are reasonably priced. Their beam wavelength of 850nm is less absorbed by water particles in the atmosphere, which means that both systems can operate efficiently under high humidity conditions.
同样在高生产率类别中,来自中国制造商Hesai的LiDAR系统。最大范围Hesai Pandar64is 200m at 10% reflectivity, the output rate is 1,152,000 pts/sec and the VFoV is 40° with a resolution of 0.17°. However, the three Hesai systems listed in Table 1 distribute the beams irregularly (gradient) over the scene; they are mostly concentrated in the horizontal plane. This may affect the coverage and uniformity of point distribution.
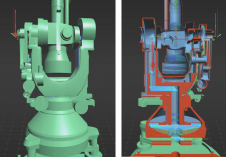
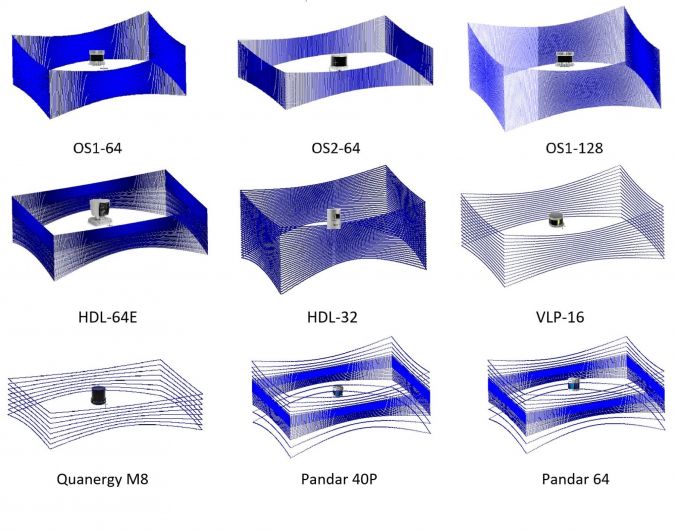
TheVelodyne HDL-64Ehas a comparable output rate and the vertical resolution of 0.4° is reasonable. The disadvantages are its weight, size and price. Figure 2 shows the scanning patterns of different Lidar devices in a closed rectangular space where they are orientated vertically without tilt.
足够的生产率(32梁)
Three Lidar sensors have been categorized in this segment. Their productivity is lower than the very-high and high-productivity segments because the number of laser beams emitted simultaneously is 32.
TheVelodyne HDL-32有VFoV 40˚,最大射程120米。它has a reasonable size, weight and power consumption and is used by mobile mapping companies such asCycloMedia,Topcon,Maverick Teledyne OptechandViametris vMS3D(Figure 3).
最近发布的功能OUSTER OS1-32are comparable to those of the Velodyne HDL32, but with a slightly lower output rate. The symmetrical angles above/below the horizon of the OS1-32 are beneficial for capturing above and below-ground objects. Considering its reasonable price this multibeam Lidar is a popular choice, especially when multiple devices are mounted in the MMS.
除了发出激光束的数量外,Hesai Pandar40P类似于高生产力pandar64。

其他
还有其他几种LIDAR传感器,可能特别适合室内和无人机系统(UAS)应用。
TheQuanergy M8具有较小的水平角分辨率,每脉冲最多可捕获3个回报,VFOV为20°,同时发射八个梁。
The冰球冰球sensors (VLP-16, Hi-Res, Lite) have output rates of 300,000 pts/sec. Their maximum range, range accuracy, size, weight, power consumption and prices are reasonable, but their geometric/scanning properties are less adequate than the HDL-32.
的功能Hesai Pandar40are similar to the Pandar40P but the VFoV of 23° is narrow. Mapping companies are using some of these Lidar sensors in their unmanned airborne systems and indoor mapping systems (Figure 4). For example, the Australian company Emesent has mounted the Velodyne VLP-16 on its悬挂图UAS (Figure 4a), and Viametris has mounted the VLP-16 (Figure 4b) on its backpack indoor mapping system.
TheC2L nebula-LP MMS(图4C)和GeoCueUAS (Figure 4d) use Quanergy M8.
最大范围Sense 30 – a solid-state sensor – is 21m, which is an impediment for outdoor applications.
列出的两个Blickfeld固态传感器的输出速率较低。密集点云的获取需要较长的调查时间。
The newly released ultra-wide-view Lidars from Ouster (namely OS0-32, OS0-64 and OS0-128) have a 90˚ VFoV which is highly efficient for autonomous driving. However, they are less relevant for mobile mapping applications because of their limited maximum scanning range of 20m @ 10% target reflectivity.

Concluding remarks
Mobile mapping companies that want to conduct large-scale projects or achieve city-wide coverage may benefit from a single multibeam Lidar with high productivity or from integrating multiple Lidar devices from the very-high or high-productivity categories. Of course, the available budget will play a key role in the system choice. A wider VFoV combined with a longer scanning range, high output rate of points and better range accuracy will always be of significant importance when selecting the most suitable Lidar device for a mobile mapping system.
Author’s note: Lidar technology is rapidly evolving and new types are being released all the time. The information provided in this article was correct at the time of writing.
Make your inbox more interesting.添加一些地理。
Receive a weekly summary of the biggest news, along with the best stories, case studies, and key market insights.
免费注册