在点云中确定的空空间中寻径
项目的意义
室内点云对许多应用是有用的,例如通过空的,无碰撞空间的路径。需要快速执行方法来识别此空的空间,因为室内环境经常变化,并且通常不会遵循架构设计。作为2015年综合项目的一部分,代尔福特理工大学在地理项目中的MSC的学生开发了一种有效地识别和结构在点云中的连接空间的方法。阅读以了解有关该项目的更多信息。
(作者:汤姆·布卢森、弗洛里安·费希特纳、伊沃·德·利夫德)
在2015年以“探索点云处理”为主题的测绘综合项目中,三组学生花了十周时间构建了一个室内、地面或空中点云应用程序。这个名为“无意义项目”的小组专注于室内点云。在生成室内空间模型时,重点往往在于识别空间的边界和空间内的物体。但对于室内寻径来说,更合理的做法是专注于空的、无意义的空间,这是真正可以使用的空间。因此,该小组开发了一种算法,可以识别和构造点云中的空白空间。
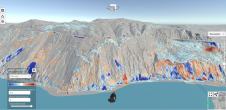
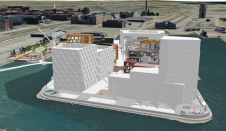
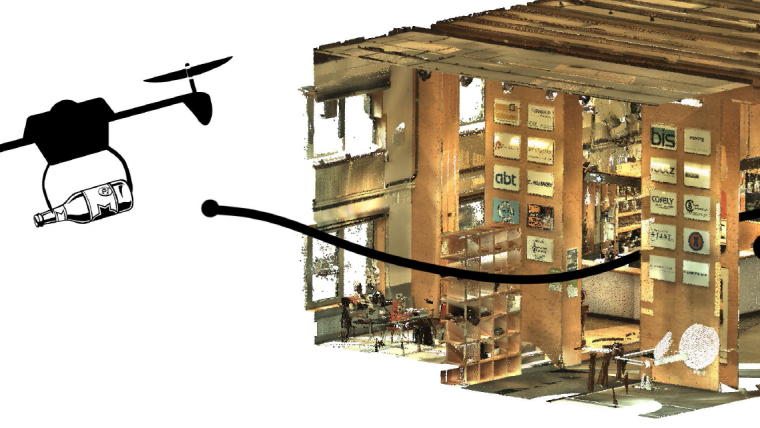
建筑学院酒吧内部的点云Bouwpub.(9mx15mx5m),由ZEB1移动激光扫描仪获得。彩色点云仅用于视觉显示,这是使用徕卡C10激光扫描仪获得的。
线性八面体
利用线性八叉树推导和构造点云中的空空间。八叉树递归地将点云细分为八个大小相等的八边形,直到预定义的最大分辨率。如果八分位本身包含更小的八分位,则称为灰节点。如果不包含较小的八分位,则称为黑(包含点)或白(空)叶节点。使用逐位交错为每个叶节点生成位置代码:这种方法将x、y和z坐标组合成一个二进制字符串。整个八叉树结构隐式地存储在结果的位置代码集中。
空的空间
在上面的过程中,首先创建黑叶节点。然后通过黑叶节点的线性八叉树结构重构出包含实际空空间的白叶节点。该方法确保黑叶节点始终具有指定的最大分辨率,因此八叉树始终在点云中的点周围达到最大分辨率。白叶节点没有进一步细分,以有效存储空白空间。
空空间的可用性已经在一个寻径应用程序中得到了展示。为了实现这一目的,在白叶节点上应用邻域寻找算法,以检索连通的空空间。在此基础上,实现了一种A*算法,利用该连接性在三维空间中寻找最短路径。
速度和可扩展性
实施该方法,使得产生6CM分辨率的八章。通过比较具有不同最大八十倍级别的八零所需的处理时间来评估实现的速度。加倍造成的总处理时间的小幅增加,表明该方法缩放得很好,以增加分辨率。当增加点云的大小时,该方法也缩放;对于四倍较大的点云,所需的处理时间仅增加3.5倍。整个过程,包括使用Zeb1激光扫描仪采集数据,只需几分钟的每间客房即可完成。
空空间的潜力
点云包含有关扫描对象和曲面的大量潜在信息,还包含可用于移动的空间。使用本文中提供的方法,可以从点云迅速且有效地派生空白空间和结构。具有空白的空间可能对3D路径突出的应用有益,因为它将焦点放在可用空间上,而不是专注于边界点或对象。它也可以用于其他可能的应用的整个色域,例如估计可用存储空间的体积并通过窄空间计算如何适应大物体。目前正在开发所提出的方法以用于室内导航。
致谢
作者们想要感谢他们在“无意义计划”中的同事:奥利维尔·罗登伯格和埃里克·希雷斯。特别感谢他们在代尔夫特理工大学的导师爱德华·威弗瑞,以及测绘系的其他人员,以及CGI荷兰公司的罗伯特·Voûte。他们给予了极大的支持。
进一步的阅读
布卢森,T.,费希特纳,F. W., Heeres, E. J., De Liefde, I., Rodenberg, O. B. P. M., verbury, E.(2015)。项目无意义:使用八叉树方法在内部点云的空白空间中进行识别、可视化和寻径。
Verbree,E。(2015)。通过探索点云洞察。连接室内和室外。在Nederlands Centrum Voor Geodesie en Geo-Informatie(NCGEO),Massive Point Cloud Data,Delft,荷兰的管理,2015年12月。
作者的传记
汤姆·博雷森是Tu Delft的一位地理硕士学生,并在物理地理中持有MSC。他目前正在研究他的毕业项目,即自动识别激光乐队点云的水课程。
tombroersen@gmail.com
弗洛里安·w·费希特纳(Florian W. Fichtner)是代尔夫特理工大学(Delft University of Technology)的一名测绘专业学生,目前正在CGI完成他的毕业作业。他对地图十分着迷,并获得了德国Tübingen大学的地理学学士学位。
fwfichtner@gmail.com
Ivo de Liefde对地球科学有广泛的兴趣,目前毕业于代尔夫特理工大学(Delft University of Technology)的测绘专业。他在乌得勒支大学获得人文地理学学士学位。
ivodeliefde@gmail.com.
配图
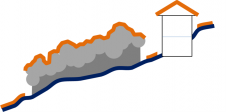
图1,无人机通过点云的空空间导航Bouwpub..
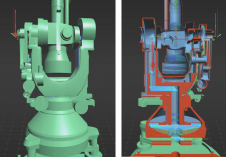
图2,鉴定了空间(透明八圈),含有黄色的八个点。
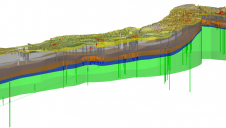
图3,路由(蓝色八边形)通过Bouwpub.(紫色八个)使用所识别的空空间。
图4,Project group的点云(从左到右):Ivo de Liefde, Florian Fichtner, Erik Heeres, Olivier Rodenberg和Tom Broersen。