点云-第三类的代表
根据Edward verree在本专栏中的观点,点云应该被视为第三种表示,除了多面体表面表示和体素表示。
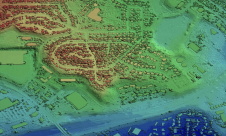
“188金宝搏特邀GIM国际”已经发表——毫无疑问将继续发表——许多关于点云的文章:大量(表面)点的集合。把它们放在一起,它们代表了最好的世界:最新的,每一个细节都需要知道。大多数文章特别关注这种点云的数据采集,因为它们是通过激光雷达时间戳反射获得的,其优点是表明观测点和地面点之间的“空白”空间,2)通过运动(SfM)和密集图像匹配(DIM)技术的结构图像与色彩丰富的点的好处。在本专栏中,Edward verree解释了为什么他认为点云应该被视为继多面体面表示和体素表示之后的第三种表示。
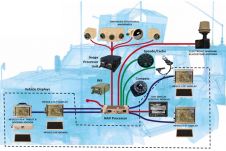
如今,获取点云的不仅是高端专业设备,而且越来越多的点云是通过低成本(消费)硬件获取的,比如智能手机摄像头和为自动驾驶汽车和室内机器人开发的(相对)便宜的激光雷达系统。这一发展也弥补了从室外到室内映射的差距。我们在室内的“未知领域”中度过了超过80%的生命,但它还没有被点云完全捕捉和呈现出来。换句话说,我们所知道的世界——因此是它自己最好的模式——正被点云越来越适当、越来越频繁、越来越密集地感知,并具有更多(派生的)属性。
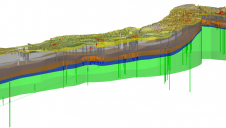
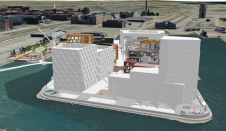
但仅仅因为所有这些点云都是可用的,并不意味着它们已经充分利用了它们的潜力。相反,点云仍然被误用来推导具有相对较低细节水平(LOD)的多面体3D城市模型。获得更好的LOD的必要步骤并不那么容易,尤其是因为细节在点云本身。确定哪些点对(希望)水密多边形网格的哪个多边形有贡献,就可以打开该著名引用的新版本动物庄园乔治·奥威尔说:“所有的分数都是相等的。但有些方面比其他方面更平等。”只有最终用户可以决定哪些点是真正重要的-这是不可能的,如果大多数点被丢弃(因此失去他们的连接)后被处理成3D城市模型。
此外,这个建模步骤需要时间和大量的手工工作。大多数建筑都有某种类型的建筑设计,因此不是简单地用任意形状的屋顶挤压块。因此,全自动处理满足用户要求的LOD2模型似乎是如此困难,以至于大多数数字孪生模型仍部分是“手工”的。这样的3D模型一旦发布就过时了,而且没有人知道这些城市模型在多大程度上代表了现实,因为它们与原始点云的联系没有得到维护。
其他研究人员选择基于体素的、体积的、类似《我的世界》的表示。主要的缺点是需要设置一个固定的方向和固定的采样率的构建块。然而,由于它们看起来不现实,人们更不可能把它们视为事实,而不是多面体的表象。
在处理巨大的点云时,有一种说法是它们是……巨大的。是的,它们是,这也是为什么我们可以这么说,支持如此大的“3D”(通常只有2.5D)城市模型。例如,点云的一个非常大的优点是它们相对简单:实际上只是一堆带有一些属性的X、Y、Z坐标。公认的基于文件的标准(LAS/LAZ)已经证明了它们对点云传播的价值。在DBMS中维护来自点云的智能结构化和(快速)查询,并将点云的连续细节级别作为第四个维度,这是一项正在进行的研究活动,具有很好的结果。
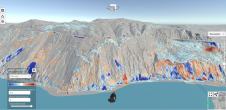
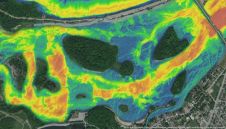
所以点云的处理是重要的,但关键的问题——如上所述——是将它们有效地用于探索性可视化和分析目的。首先,“丰富”点云范式通过综合几何、辐射和语义属性来丰富稠密3D点云的概念。当点云本身知道这些属性时,它们就变得“智能”了。如果基于点云,尤其是考虑植被时,决策的可见性分析提供了更详细和现实的结果。
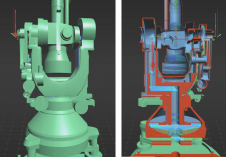
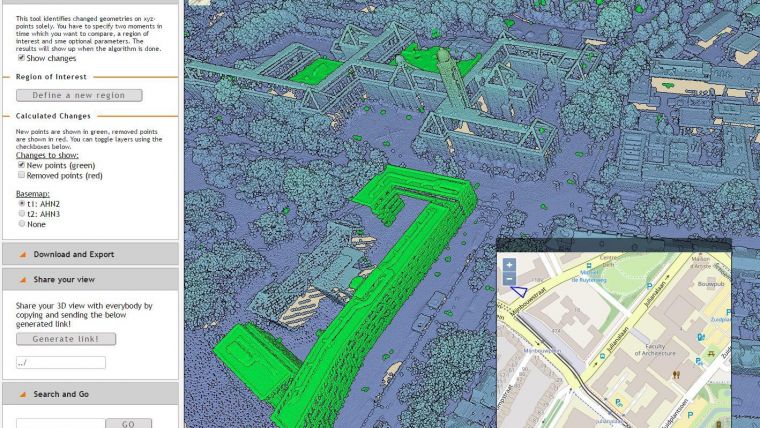
让我们不要忘记人类皮层的功能。我们人类仍然非常擅长在3D场景中检测细节。一些可能在3D建模过程中丢失的突出点可能比场景中的其他点更重要。建筑物的哪些部分是按照设计建造的,哪些不是?点云的这种探索性使用得到了诸如基于点云的变化检测等分析工具的支持,还得到了屏幕上的高端3D点云可视化工具的支持,在基于点云的增强现实环境中甚至更好。
最后但并非最不重要的是,为什么要花费那么多的时间、精力和金钱来收集点云,把它们当作输入数据,把它们处理成衍生品,然后抛弃它们呢?如果你仔细想想,会觉得这很荒谬。相反,我认为点云应该被认为是第三种表示,除了多面体面表示和体素表示。但通过探索性的可视化和分析,它们可以提供更多的见解(因为它们或多或少是现实)。所以我的建议是:直接使用它们!
感谢Martijn Meijers、Peter van Oosterom和Mathias Lemmens的帮助和灵感,以及代尔夫特理工大学的许多地理信息学和GIMA硕士学生。