使用MMS进行道路维护
使用移动激光扫描的精确和详细的3D模型
移动地图系统(MMS)可以从货车或其他移动平台上收集道路及其附近的激光数据和图像。在这里,作者描述了芬兰开展的一项试点的数据收集和准确性评估。结果表明,利用复杂软件处理的MMS数据可以从三维模型中精确计算出许多参数,非常适合道路养护任务。
MMS测量可以在短时间内高精度地绘制道路及其直接环境的详细地图,同时尽量减少对交通的滋扰和事故的风险。为证明该模型适用于道路维修,我们进行了一项试验,以评估3D模型的准确性,确定道路的损坏和变形,并利用3D模型设计路面更新。此外,MMS调查提供了必要的输入的表面机。
数据收集
在芬兰东南部的6号国道(NR6)上,一段22公里长的双车道路段被一台Trimble MX8相机捕捉到,该相机由两台Riegl VQ-250扫描仪、四个摄像头(一个记录路面,三个指向前方)和一台用于定位目的的Applanix POS LV 520相机组成。这两条车道大多与森林接壤,都被捕获了,即往返,速度为50 - 70公里/小时。为了地理参考目的,地面控制点(gcp)被绘制在三个路段的两侧,间隔为50米,并使用Trimble R10 GNSS和DiNi Level仪器测量。每段长度500-600m,共放置74个gcp。我们使用TerraScan、TerraMatch、TerraPhoto和TerraModeler进行处理。这些模块运行在宾利的微型工作站上。
精度
错误的一个主要来源是由于隧道、建筑物、树木、岩石或道路附近的其他障碍物而阻塞GPS信号。这些错误可以通过使用gcp和前后录音之间的重叠来纠正。为了确定gcp的数量和分布与精度之间的关系,我们系统地将所有gcp的数量减少到500米的间距(表1)。
原始数据 |
所有的质量 |
GCP间距 |
|||
100米 |
200米 |
500米 |
|||
Z的平均大小 |
12.8 |
0.1 |
0.3 |
0.5 |
2.5 |
Z标准差 |
0.1 |
0.5 |
0.7 |
1.9 |
|
XY平均大小 |
7.4 |
0.7 |
1.3 |
1.8 |
2.4 |
表1,精度[cm]与gcp间距的关系。
100 ~ 200米的GCP间距提供了良好的精度,但在较粗的间距下,由于原始轨迹定位的漂移的非线性,精度会迅速下降。对于高精度工作,标高间距不应超过50m,平面坐标间距约250m。此外,gcp的高程应使用水平仪测量,以获得较高的精度。
路面
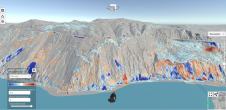
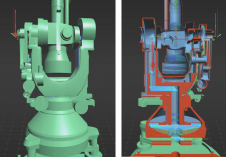
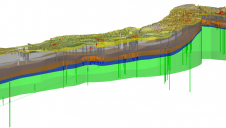
在匹配前后录音之间的重叠后,所有非道路点被自动删除。生成1cm地面样本距离(GSD)的正像图像,以支持道路损坏和先前的修复工作(图1)。然后,将激光数据和正像图像结合起来,手动数字化中心线、边缘线和道路边缘,从而得到精确的矢量数据集。利用中心线和边缘线创建表面模型,从而能够从激光数据中提取深度至少为2cm的车辙和坑洞。路面内外边缘高度之间的垂直距离(超高程)可通过交叉道路箭头和斜坡坡度直观显示(图2)。图3显示了七个等级的局部坡度:红色表示小于1%,橙色表示1% ~ 2%,黄色表示2% ~ 3%,黄绿色表示3% ~ 4%,绿色表示4% ~ 5%,蓝绿色表示5% ~ 6%,蓝色表示大于6%。坡度大的地区会影响驾驶条件,但也会有快速的水流,而水会在平坦地区停留更长时间。
修路
这项调查显示了更新沥青的迫切需要。道路设计软件还没有很好的装备来处理大量的点云。因此,原始的3D模型被减薄并用于创建一个新的设计表面,该设计表面被导入机器控制系统并用于路面重铺。此外,这些数据还可以准确估计地表更新活动所需的材料量。
结束语
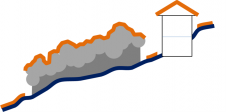
未来的解决方案可能包括视线分析(图4)、路面粗糙度和横截面的计算、油漆标记和道路断线的自动矢量化以及道路附近物体的检测。
确认
感谢terrassolid Ltd的Kjell Tuominen和Arttu Soininen,以及NCC Roads Ltd的Manu martinen。
进一步的阅读
www.terrasolid.com/download/presentations/2012/mobile_accuracy_and_control.pdf
图标题
图1,坑洞、车辙和其他深度至少为2cm的变形用蓝色表示。
图2、超标高:蓝线表示路段位置(下)
图3,中心和边缘线显示为白色,局部坡度梯度显示为类。
图4,遮挡视线的物体(橙色);红色数字表示司机在以100公里/小时的速度行驶时无法及时停车的距离。