朝向最佳的3D点云
三维移动激光扫描的自动化
作者设计了越来越多地需要环境快速表征环境的快速表征,设计了一种机器人系统,可自动实现陆地激光扫描仪的操作员的工作。建筑系统可以在没有标记或目标的情况下工作,节省验船师超过75%的时间在该领域所花费的时间。用于开发平台的另一个脉冲是对远程检查工具的需求。机器人能够测量远程网站或危险区域,例如植物,地下矿山,隧道,洞穴或通道。机器人平台的可用性进一步实现了移动激光扫描系统的研究。现在,系统已准备好完成工作。本文详细信息首先是移动机器人,其次是软件解决方案。该软件包括用于地面扫描的自动,高精度注册程序,即捆绑调整和移动映射的扩展,需要精确校准和轨迹优化。该算法不依赖于任何点的功能。
3D地图应用智能机器人(Irma3D)是一种机器人移动激光扫描系统,用于自动化地面激光扫描和小型化移动地图。研究了移动激光扫描场景下的自动注册和校准等科学问题。Irma3D是一款小型、轻型、电池驱动的三轮车辆(图1和图2)。
它的宽度为52厘米,总长度为65厘米,足够小,可以通过狭窄的门道。三轮设计允许高机动性,这样它可以在现场旋转。这些特性使Irma3D非常适合室内环境。然而,高功率电动双主动轮差动驱动(最高速度约为2.2m/s)与被动脚轮相结合,也使其能够在中等挑战性的户外环境中工作。机器人可以通过无线局域网连接或手柄进行远程控制。Irma3D也可以在完全自主模式下使用。一旦激活,Irma3D将尝试在预设的限制内探索其周围的环境,并创建环境的3D地图。
双重使用
作为激光扫描平台,它可以作为移动激光扫描仪,即在环境中移动时获取距离测量。或者,机器人可以在获取三维点云时保持静止。这种静态激光扫描被称为“走走停停扫描”。可以创建环境的3D模型,如移动激光扫描的细节。然而,由于激光扫描仪在机器人移动时不工作,在这种模式下需要更多的时间来创建同样大的点云。Irma3D的这种双重用途是由它所配备的3D地面激光测距仪实现的。如果没有一个能够自由旋转的3D扫描仪,Irma3D就无法获取其周围环境的3D范围图像。
Irma3D机器人由几个传感器、一个移动平台和一个便携式笔记本电脑组成,用于处理数据和控制机器人本身。机器人的底盘是经过改造的VolksBot RT3,它有两个前轮。每一个都由一个150W的马达驱动。电机的功率足以使机器人以2.2m/s的最大总速度移动。第三个轮子在底盘的后面。它是旋转安装的,因此完全被动,因为它跟随前轮的方向。该平台由4节12V 7.2Ah铅电池供电。机箱有一个可变的笔记本安装,可以适合任何合理大小的笔记本电脑。目前,Irma3D运行在三星Q45三星12.1”笔记本电脑与英特尔酷睿2双核CPU T7250。将笔记本电脑安装在机箱控制元件的上方(图2)。VolksBot RT3平台的物理尺寸为58cm × 52cm × 32cm,重量约22kg。 Most of this weight is from the lead batteries, each contributing about 2.5kg. By equipping the robot with a laser scanner and a camera, the height and weight increase accordingly.
在导航和避障方面,机器人配备了SICK LMS100。这台2D激光扫描仪安装在底盘前部,面向前方,以50Hz的速度进行2D范围扫描。为了支持人类操作人员远程控制机器人,两个小型的罗技QuickCam Pro 9000型网络摄像头也安装在底盘的前面。VolksBot的马达上装有编码器来测量车轮的转动。这些信息被用来通过测程法提供机器人的姿态估计。通过连接到机器人平台上的IMU xSens MTi的数据,姿态估计得到了改善。IMU易受磁场干扰,必须放置在远离强磁场的地方,以减少传感器的错误读数。由于电机和激光扫描仪会产生磁场,IMU固定在底盘的后部和底部。
IRMA3D的中央传感器是RIEGL VZ-400 3D激光扫描仪。扫描仪安装在Volksbot机箱的顶部。连接到扫描仪的顶部是佳能1000D DSLR相机。在获取3D扫描之后,相机用于获取点云的颜色信息。使用热相机OPTRIS成像器PI进行类似的处理,该方法也安装在扫描仪的顶部,以获取关于点云中结构的热特性的信息。RiegL VZ-400能够在其垂直轴上自由旋转,即使机器人不运动,也能够获取3D扫描。它还返回所谓的校准相对反射率值作为对表面距离的影响的校正。
地面三维扫描的高精度配准
软件开发的基础是著名的迭代最近点(ICP)算法。给定两个3D点云和一个粗略的初始姿态估计,例如通过机器人的测程法,ICP迭代修正第二次扫描的姿态估计(6个自由度的平移和旋转)。为了做到这一点,该算法选择两个原始扫描之间的最近点,并使误差函数最小化。目前对ICP算法的研究主要集中在ICP算法的快速变体上。
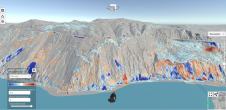
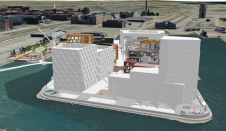
成对的ICP提高了扫描姿态估计,但当增加更多扫描时,配准误差会增加。同时定位与映射(SLAM)算法使用循环闭合来最小化此类错误的范围。最近提出的全局一致扫描匹配算法是一种针对三维扫描的束调整解决方案,它扩展了ICP算法。输入是n点云及其输出改进了所有扫描的姿态估计。以一种类似icmp的方式,算法迭代计算SLAM图中指定的所有扫描对之间的最近点。利用这些点对,基于最小二乘误差最小化的改进姿态计算。图3显示了奥地利霍恩的一个场景,在那里,扫描已经注册了ICP及其全球一致的扩展。值得注意的是,该算法不需要任何特征提取。
移动地图自动校准
为了利用移动激光扫描系统获得高质量的距离测量数据,必须知道每个传感器的位置和方向。目前正在开发这些系统的算法校准方法,即基于传感器数据本身建立最能描述传感器位移的参数的算法。在此过程中,通过外部仪器粗略测量的参数会自动进行微调。
移动映射中的最先进状态是:(1)对于所有传感器,确定车辆上的位置和方向(校准),(2)数据采集,(3)从传感器数据中提取车辆的轨迹(卡尔曼-Filter, etc.) (4) ‘Unwind’ the laser measurements with the trajectory to create a
三维点云。展开是指根据扫描仪的距离测量、当前扫描镜的旋转、轨迹和校准信息计算三维点云。
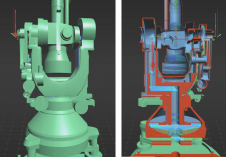
自动校准方法遵循这四个步骤,但“展开”步骤被视为函数。已经设计了一个错误测量,由此基于3D点确定所得到的点云的质量。使用的熵由与先前提到的注册方法非常相似的最近点对应关系。可以优化每个传感器的位置和姿势,即执行自动钻孔视觉对准,以及用于定时不准确。除了传感器未对准之外,第二个错误来源是与时序相关的问题。在移动平台上,所有子系统都需要与共同的时间帧同步。这可以通过纯硬件通过触发或使用每秒脉冲(PPS)或网络时间协议等硬件和软件混合来实现。由于机器人IRMA3D未配备GPS时钟或任何中央触发机制,因此每个传感器都使用其自己的定时器,并且通过校准过程改善了同步。
用于轨迹优化的半刚性SLAM
除了校准,一个更重要的误差来源是车辆的不正确的定位。解决这个问题需要采用传统的、严格的SLAM算法以外的方法。一个可以提供解决方案的区域是非刚性配准区域。这种方法利用全6D姿态优化点云,而不局限于单个扫描仪旋转。相反,在整个轨迹的所有6个自由度上,整体扫描质量都得到了提高。这种半刚性SLAM解决方案以一种类似于icmp的方式计算最近点对,并包含一个时间阈值,以防止连续扫描切片的匹配。这样,旋转扫描器就不需要算法来提高扫描质量。这可以在最先进的移动激光扫描仪上演示。
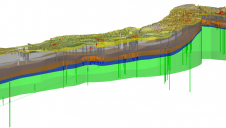
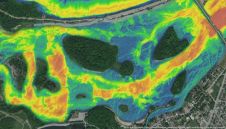
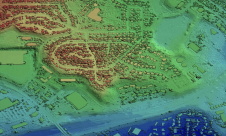
图4显示了由Riegl激光测量系统GmbH获取的移动映射数据集的结果。持续旋转的Riegl VZ-400激光扫描仪安装在车顶架上。唯一的输入是GPS数据和来自旋转激光的扫描。顶部描绘了概述和系统设置。中间部分通过使用GPS轨迹解除扫描来介绍初始3D点云。底部显示优化点云。
未来的计划
为了完成获取的三维点云,计划在一架小型无人机上装备激光扫描仪,并从鸟瞰角度增加扫描点。此外,对获得的数据的解释,即语义场景的感知和理解,是有趣的。
进一步的信息
在sourceforge的“3DTK - the 3D Toolkit”项目中,有几个处理地面激光扫描的程序在GNU公共许可下可用(http://threedtk.de.).
有关使用Optech扫描仪和半刚性SLAM的最先进的移动映射解决方案的比较:http://youtu.be/L28C2YmUPWA.更多机器人视频和动画:http://www.youtube.com/user/AutomationAtJacobs.
有关扫描仪的进一步信息:www.riegl.com和www.youtube.com/user/riegllms..