文章
选择无人机激光雷达测绘的主要原因是什么?
基于无人机(UAV或“无人机”)的激光雷达测绘通常可以被认为是有人机载激光扫描的近距离版本。简言之,较低的动员成本和更高的空间分辨率允许在多个学科中使用新的激光雷达测绘用例,如林业、测深、考古学、基础设施测绘、灾害管理等。
一般而言,基于无人机的现代激光雷达解决方案可分为以下类别之一:
- 测量级传感器,具有束散度<1 mrad的窄激光束,在MHz范围内的高脉冲重复率和复杂的基于全波形的信号处理。这些高端传感器重约1至4公斤,通常集成在多直升机无人机平台上,并在最大空间分辨率超过500点/米时使用2.测量精度要求在毫米范围内。
- 超轻传感器重量<1kg,通常集成在多直升机或固定翼无人机平台上。重量越轻,飞行耐力越长,因此面积测量性能越高。如果(i)分米精度足够,且(ii)法律允许超视距(BVLOS)操作,则此类传感器是首选。
- 闪光激光雷达飞行时间(ToF)相机。这是市场上最便宜、最轻但同时精度最低的系统。闪光激光雷达相机主要用于避免碰撞、目标跟踪和增强现实等应用,而不是用于传统的测绘任务。
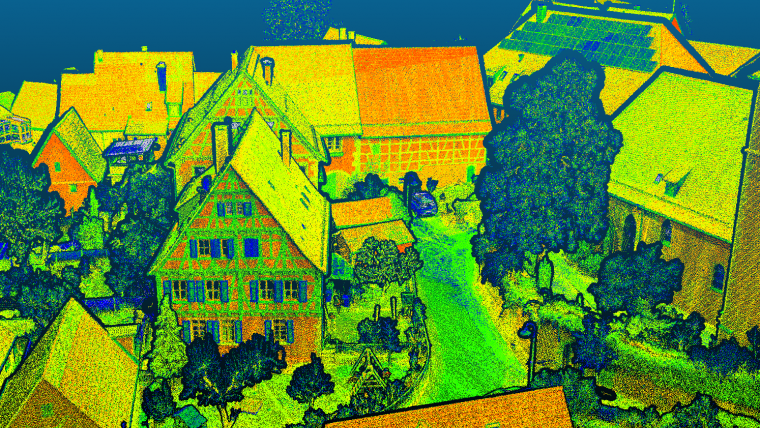
与使用被动RGB相机传感器的无人机摄影测量相比,调查级无人机-激光雷达具有多目标能力(即每次激光发射多个回波),从而穿透植被等半透明物体。它还提供精确的几何形状和辐射测量(信号强度)。作为一种主动测量技术,不需要纹理,甚至可以在各自的飞行许可下进行夜间操作。然而,与基于图像的无人机测绘相比,无人机激光雷达依赖于直接地理参考,因此需要适当的GNSS/IMU硬件。与密集图像匹配不同,生成的高分辨率3D点云的每个点都是单独测量的,因此像dem这样的后续产品更可靠。最先进的传感器在同一无人机平台上提供被动摄像机和主动激光扫描仪,通过数据融合实现了两者的最佳结合。
Gottfried Mandlburger是图维恩大学大地测量和地理信息系摄影测量研究小组的高级研究员。























