灵活的基于云的PPK服务,降低成本壁垒
Rokubun开发了一种快速灵活的基于云计算的PPK引擎,被称为杰森该公司的目标是在全球卫星导航系统(GNSS)市场实现精确定位的民主化。
后处理运动学(PPK) GNSS多年来一直是土地测量界研究的热点。尽管建立了从未经修正的现场数据到准确位置的工作流程,但该工作流程中涉及的硬件和软件通常都非常昂贵。主要GNSS厂商的PPK软件价格通常在3000 -6000美元/份。随着单(u-blox NEO-M8T)、双(u-blox zede - f9p)和三频(Septentrio Mosaic X-5)低成本接收器的出现,能够以低价格输出高质量的原始数据,唯一缺少的部分是能够获取GNSS原始数据并输出准确地理位置信息的软件。
2016年,作为其在GNSS市场上实现精确定位民主化的长期工作的一部分,Rokubun决定创建一个基于云的PPK服务,以消除高成本障碍。在目前的概念中,Rokubun的PPK引擎被称为杰森,能够以多种不同的格式(RINEX v2, RINEX v3, RTCM, u-blox, Septentrio, Android等)获取数据,自动搜索和获取距离探测器接收器最近的基站的RINEX文件,并在尽可能的基础上计算PPK,精确点定位或单点定位。此外,如果最终用户想要上传他们自己的基站文件,JASON可以灵活地做到这一点。所有这些过程都是在最少的终端用户交互下进行的,减少了出错的机会和对GNSS专业知识的需求,而且价格前所未有,整个过程不超过几分钟。
在标准操作条件下(精度稀释良好,且GNSS基站的基线小于30公里),使用双(或三)频GNSS探测车和基地接收机进行摄影测量飞行,可获得厘米均方根水平误差。
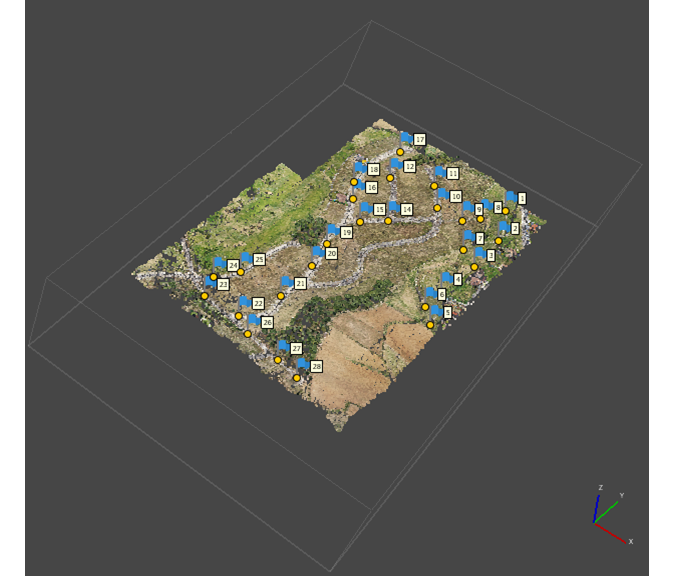
Rokubun目前正在为JASON添加更多的功能,从一个工具开始,允许无人机捕获的图像的EXIF数据。这将使用户能够上传他们的活动图像和相关的GNSS原始数据文件,以获得一个文件,其中包含每个捕获图像的同步精确坐标,准备导入到摄影测量软件,如Agisoft metshape或Pix4D。这意味着,像DJI Phantom 4 RTK这样能够记录原始GNSS数据的无人机(uav或“无人机”)的所有者可以方便地获得无人机拍摄的图像的精确坐标。在目前的状态下,JASON能够以其类中匹配率最高的方式从GNSS原始数据中检测和注册相机事件,提供了稳健的图像-事件匹配结果。
有关云服务计划和价格的更多信息,请访问JASON网站.