
在那里与地面激光扫描仪(TLS)相比,移动测绘系统显著提高了扫描速度和点云覆盖范围,这在扫描和测绘行业得到了普遍认可。对于建筑内部和设备来说尤其如此。这减少了站点上的时间,从而降低了扫描服务提供商的成本。
那么为什么不是每个扫描服务提供商都从TLS切换到移动系统呢?答案是,在移动地图系统能够实现的数据质量方面,仍然存在许多犹豫,同时也不确定哪些已建立的扫描到cad /BIM的工作流程能够与移动系统的数据顺利运行。因此,许多激光扫描专业人士和测量员往往会问以下问题:
“我看到了移动地图在数据采集方面的优势,但我如何确保在创建交付成果(如CAD图纸或BIM模型)时不会浪费时间?”
在CAD中绘制竣工条件的2D图纸
从全球来看,大多数已建成的文档仍然是2D格式。从点云创建二维平面图和现有建筑立面图的最常见方法是使用几分米厚的水平和垂直切片作为蓝图。水平切片的最佳实践是将注册的点云切两次:在天花板的正下方,以最小化点云中的家具,并在1.20-1.50米的高度,以获得门和窗户等开口的正确表示。这通常发生在点云编辑软件中。然后将点云剖面导出到合适的CAD软件中,在该软件中,建筑构件的轮廓,有时还有设备、家具和其他资产的轮廓都是在手工绘制过程中绘制出来的。
使用NavVis点云数据,详细的平面图和立面图通常可以按照1:100或1:50的比例绘制。除此之外,高可靠的精度、低点云噪声和精细细节的高分辨率是高效创建满足项目要求的交付成果的关键。
此外,NavVis IndoorViewer在地图绘制过程中,通过现场拍摄的详细全景图像实现无缝导航。这些全景图像有助于以快速可靠的方式解决点云表示中的任何模糊问题(例如“这是一件家具还是一个建筑元素?”)。
BIM中竣工条件的三维建模
虽然二维表示的竣工文件仍然广泛使用,但对BIM的需求正在快速增长。政府对公共项目的要求越来越多,大型企业业主也在为私人项目要求BIM交付成果。从注册的点云创建BIM模型通常从初始的“清理”数据开始,删除不相关的点,如植物或邻近建筑的立面。下一步是将数据导入到你选择的BIM建模工具中。
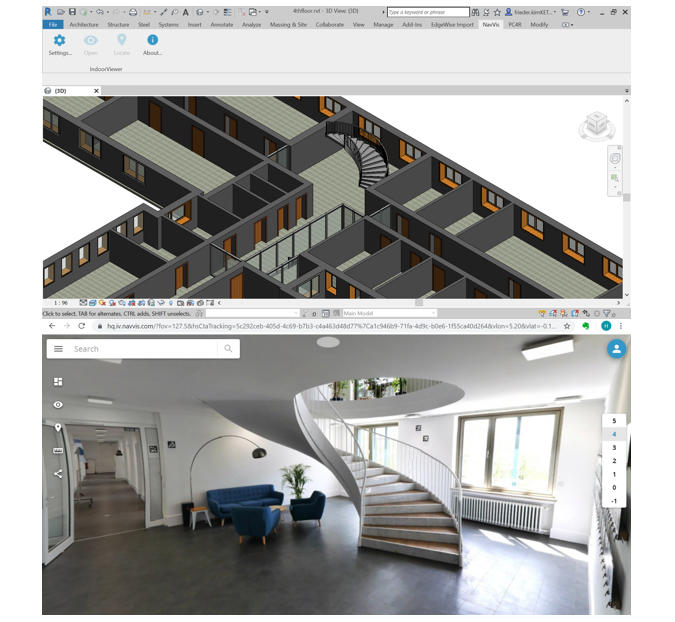
在这个例子中,我们使用Autodesk Revit:在导入成功完成后,你可以开始建模过程,通过根据建筑层次结构的点云。这使您能够逐层建模您的建筑,只显示相关的点。在这样做的过程中,建筑构件,如墙、柱或开口,可以很容易地在手工过程中识别和建模。
基于NavVis数据,LOD (Level of Development) 300的BIM模型是典型的交付品。
除了高度可靠的精度,低点云噪声,逼真的色彩和精细细节的高分辨率是一个有效的建模过程必不可少的。
一个很好的例子是由Vermessung Schubert ZT设计的维也纳历史悠久的地铁站的调查项目。更重要的是,NavVis IndoorViewer插件为Autodesk Revit使用户可以直接跳转到相关的全景图像,通过点击所需的位置在Revit模型。全景图像展示了场地的真实情况,帮助用户更好地理解现场环境,并建模精细细节,这些细节通常很难通过点云识别,如开关、插头或详细的结构节点。
使用点云的可视化和模拟
在化工或石油和天然气等流程工业中,特别是在海上项目中,点云通常用于直接表示3D模型中设施的初始状态,而不需要重新构建现有条件。在这种情况下,应该拆除设备的点云,并使用CAD/BIM元素对新设备进行建模。这种方法加快了计划,因为大量的手工重构工作被减少了。这种“混合”建模方法允许在点云和新设备模型之间进行视觉干扰检查和碰撞检测,用于生产工程和设备移除、运输和安装的规划。
近年来,这种方法在离散制造中也得到了广泛的应用,如汽车工业,例如布局规划、装配规划和过程仿真。此外,在拥有复杂设备和工艺的非工业建筑中,如医院,目前正将这种方法用于翻新和再利用项目。
NavVis点云数据特别适合这个应用程序。这是因为使用NavVis技术可以快速、准确地扫描大型工业空间。由此产生的点云具有低噪音和高度逼真的纹理和着色,使数据非常适合于生产设备的可视化,如载流子和机器。在这种情况下,NavVis IndoorViewer中的下载点云功能是非常适合的:点云部分,如特定的设备,可以选择和下载直接从浏览器窗口。与生产计划软件的进一步集成,如来自达索Delmia的3dexperieplatform,形成更先进的应用,如工艺和物质流模拟的基础。

矢量化加速二维绘图过程
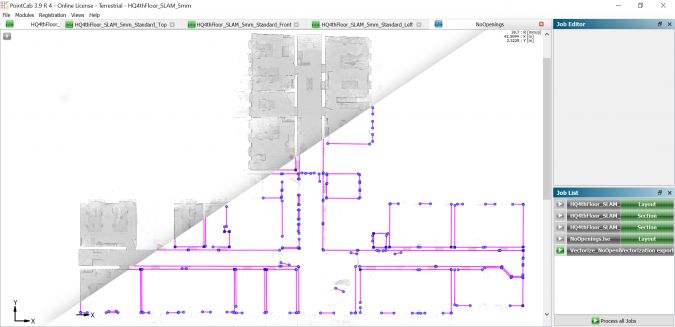
如前所述,创建2D CAD交付品的手工跟踪和绘图过程非常耗时。今天,像PointCab这样的商业软件包提供了强大的向量化功能,这大大加快了起草过程。在PointCab中,用户通过点云生成水平或垂直部分。这一节可以用来应用向量化函数。因此,生成了一组最适合的2D行。这些线条还不是一个完整的计划,但对于剩下的2D绘图步骤来说是一个很好的开始,包括清洁和完成墙壁和房间的轮廓,以及添加门和窗户的舱口和符号。这通常是在CAD软件包中完成的。此外,矢量化算法有助于减少手工绘图的不准确性到最低限度。
NavVis点云数据非常适合这个工作流程,因为相对较高的精度标准和点云细节的高分辨率。此外,映射过程中显示的实时反馈帮助操作者实现最大的点云覆盖。这减少了点云中的盲点或缝隙,这对于最小化手工返工的矢量化结果至关重要。在下面的矢量化例子中,我们选择了一个高于门开口的部分高度,以确保房间的轮廓具有最大的完整性。这个结果大大减少了手工绘制的工作量。
三维建模中目标提取的效率
当需要BIM文件时,通常会使用基于点云的手工建模和跟踪过程。然而,根据所需LOD的不同,这些手工流程可能非常耗时,因此也很昂贵。虽然全自动的一键扫描到bim的过程似乎仍然是一个未来的愿景,但最近在这个方向上已经取得了令人印象深刻的进展。
在本文档中,我们将接触到两个特定的用例,其中自动或半自动对象提取目前正在使用,与来自cleararedge3d的EdgeWise软件工具(也可作为Autodesk Revit的插件)。第一个应用程序是从点云自动生成建筑组件,如关卡、墙壁和天花板。这是一键式的方法,结果令人印象深刻。当然,这并不能得到一个完整的BIM模型,因为门窗仍然缺失,一些元素需要清理(例如,门叶经常被表示为墙壁)。然而,据cleararedge3d的一位客户说,这使得建模过程的速度快了10倍。
EdgeWise的另一个突出应用是从点云中半自动提取管道和结构元素。要做到这一点,用户选择点云的一个区域,软件自动创建一个最适合的管道几何形状。进一步的工具允许在管道元件之间创建接头和t型连接。这大大加快了手工建模过程,从而降低了成本。
cleararedge3d已经注意到移动地图系统在数据采集效率方面的主要优势。这意味着上述工作流不仅适用于来自TLS的点云数据(“结构化数据”),也适用于来自移动地图系统的数据(“非结构化数据”)。
由于相对较高的精度标准和点云中的低噪声,NavVis点云数据特别适合于此。在NavVis最近进行的内部可靠性测试中,直径为105毫米、75毫米和60毫米的管道在2米和5米的扫描距离内都能可靠地探测到。此外,墙壁和关卡的自动创建在基于NavVis数据的测试中提供了非常令人满意的结果。
NavVis数据质量综述
相对和绝对精度:所有基于slam的移动地图系统都面临漂移的挑战,特别是当项目不允许“循环闭合”时。NavVis开发了专有的SLAM算法,将漂移降低到最小。此外,两种NavVis映射设备——NavVis M6和NavVis VLX——都可以使用控制点(测量目标)来验证相对(本地)和绝对(全局)精度。最后,NavVis后处理软件允许基于测量控制点的绝对精度优化。关于移动地图背景下的精度的全面讨论,请参阅《室内移动地图精度手册》。
点云噪声:来自移动地图系统的数据通常比来自TLS的数据有更高的噪音水平。对于流行的手持系统来说,这将产生一条3厘米厚的“线”,代表平面、垂直的表面,如水平部分的墙壁。NavVis后处理软件中的滤波算法将噪声降低到最小,导致截面上出现尖锐的直线。这些结果与市场上其他移动地图设备相比,与TLS的数据具有更大的可比性。
细节分辨率: NavVis后处理软件独特专有的滤波算法,确保点云滤波过程中保留了精细的几何细节,如上面电梯门套开口的轮廓。这确保了可以基于数据创建比例为1:50的平面图。

点云着色其他移动地图设备创建的点云要么单调要么没有颜色,而NavVis创建的点云具有高度逼真、明亮的色彩。这是可能的,因为NavVis M6和NavVis VLX都可以在映射过程中获得许多高分辨率的图像。
点云的纹理和分辨率其他移动地图系统的点云数据通常看起来“不连贯”或“模糊”,特别是在3D中,NavVis的后处理算法在物体表面创建了一个高度统一的点网格,分辨率高达5mm。
全景视图集成建模:NavVis IndoorViewer插件为Autodesk Revit让用户无缝连接BIM模型到高清全景图,在建模时显示建筑的当前状态。用户可以点击BIM模型中的任何位置,相应的全景图将显示在插件中;这消除了手动搜索正确的全景图的任务。与点云相比,高清全景视图帮助建模者快速和容易地理解环境的细节,特别是如果建模者或设计师没有在现场。
数据兼容性和适用性: NavVis主动支持开放的行业标准和格式,如E57点云格式。此外,NavVis与市场领先的软件供应商合作进行矢量化和对象提取——PointCab和ClearEdge3D——除了现有的NavVis与Autodesk Revit的集成,以确保NavVis VLX和NavVis M6无缝配合现有的绘图和建模工作流。